中国自动化学会(CAA)青年工作委员会“走进高校系列研讨会”(第10期)成功召开
导读 2020年7月16日,由中国自动化学会主办,CAA青年工作委员、广东海洋大学和广东石油化工学院联合承办的中国自动化学会(CAA)青年工作委员会“走进高校系列研讨会”(第10期)在广东省湛江市通过线上和线下模式联合举行。研讨会邀请了上海海事大学王天真教授、美国麻省理工学院(MIT)张斯伦博士后、北京大学喻俊志教授、广东海洋大学刘洺辛教授、北京科技大学何修宇副教授和燕山大学赵延志教授先后围绕“海洋科学与人工智能”主题做了特邀报告;同济大学葛泉波教授、南京信息工程大学陆振宇教授和上海海事大学周福娜教授分别主持了讨论会;最后,所有参会专家围绕“海洋科学与人工智能”进行了自由讨论。
该报告以新型高速、高机动、低扰动仿生机器海豚为例,着重介绍其运动控制包括定深、定向、平面路径跟踪控制及跃水控制等方面的研究进展,以及在野外水质监测中的应用,并对未来研究方向和工作重点进行分析和展望。
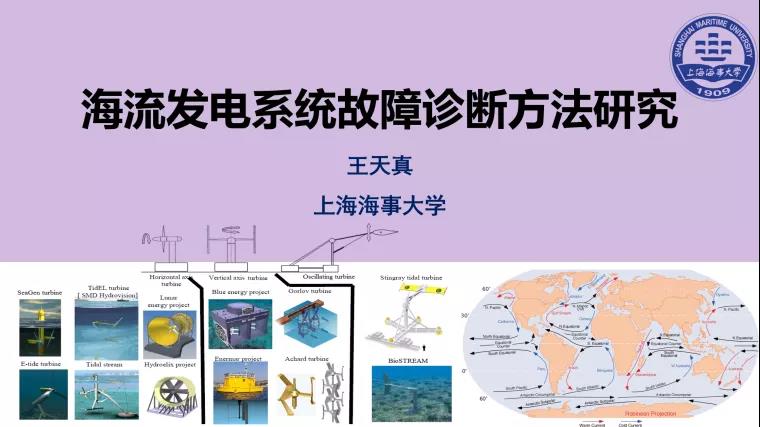
该报告系统总结了王天真教授课题组长期以来在海流发电系统故障诊断研究方面的研究成果,主要是针对海流发电系统不同海流流速的故障特征多样、故障特征不明显及故障耦合问题,采用时频特征提取、融合决策、机器学习等方法,实现特征提取与表示对海流透平机叶片附着物识别、海流发电机绝缘系统故障检测、海流发电逆变系统故障诊断。

该报告介绍了一种使用估计矩动力学对多智能体集体行为进行建模和分析方法。该方法通过计算矩轨迹来预测智能体分布演化、重构智能体的分布,恢复群体的宏观尺度特性,分析具有单项矩的情况下力矩动力学的误差界和收敛性,该方法适用于多种类型的多智能体系统

刘洺辛教授重点介绍了海洋环境下水下目标监测基础理论与关键技术:目标建模、跟踪辅助的水下目标分布式协同探测和智能识别理论和联合识别与跟踪理论和方法,提升了对水下移动目标的动态持续监测能力。
该报告围绕几类常见的海洋柔性系统,介绍其动力学分析与建模以及基于其分布参数模型的主动边界振动控制方法设计。所提出控制方法的设计采用了较少的传感器和执行器,易于实现,能够为海洋柔性结构的振动抑制问题提供一种好的解决方法和思路。

该报告提出基于颗粒和纤维联合干扰的大范围变刚度原理,为解决软体机器人承载力不足提供了新思路;提出了多向变刚度抓取方法,在不影响运动特性的同时,改变了软体机器人的方向刚度。在并联机构和智能抓取等领域提供有效的理论基础和关键技术支撑。