中国自动化学会青年科学家论坛暨自动化前沿热点论坛在南京成功举办
12月18日,中国自动化学会青年科学家论坛(第18期)暨第22期自动化前沿热点论坛在南京信息工程大学如期举办。南京信息工程大学副校长戴跃伟教授,北京理工大学自动化学院院长夏元清教授,中国自动化学会青年工作委员会主任贺威教授(北京科技大学自动化学院副院长),南京航空航天大学自动化学院副院长陈谋教授,东南大学数学学院温广辉教授,中国科学院自动化研究所《自动化学报》编辑部的欧彦主任,北京理工大学自动化学院副院长孙健教授,哈尔滨工业大学航天学院周彬教授,瑞典皇家理工学院胡晓明教授,北京航空航天大学胡庆雷教授,郑州大学梁静教授,华南理工大学张通教授,天津大学穆朝絮教授,中国科学院数学与系统科学研究院赵文虓研究员,东南大学曹向辉教授,以及南京信息工程大学自动化学院党委书记刘佳教授、李涛教授、葛泉波教授等通过线上或线下的方式参与了本次论坛。论坛采用大会报告的形式进行交流,同时开通线上会议直播,吸引了众多学者、师生主动参与。论坛开幕式由南京信息工程大学自动化学院院长刘雪明教授主持。

本届论坛由中国自动化学会、IEEE/CAA Journal of Automatica Sinica (JAS)、《自动化学报》主办,中国自动化学会青年工作委员会、南京信息工程大学自动化学院承办,江苏省自动化学会、中国自动化学会人工智能与机器人教育专业委员会、中国指挥与控制学会青年工作委员会、中国人工智能学会认知系统与信息处理专业委员会协办。

戴跃伟副校长在开幕式上致辞。他代表学校师生向出席本次论坛的领导专家表示了最诚挚的欢迎。他介绍,学校高度重视科技创新引领,坚持人才强校发展战略,推进国际合作交流,打造国际化办学品牌。近年来,学校加快信息工科建设步伐,打造信息工科特区,进一步深化改革,引进学科领军人才,打造高水平师资团队,实现信息工科学科群整体跨越提升。他希望以此次论坛为契机,广纳真知灼见,广聚学术资源,为未来的学术研究与合作寻求新思路,拓展新途径。

贺威主任线上致辞。他首先代表中国自动化学会青年工作委员会向参会嘉宾表示热烈的欢迎,并对青年工作委员会的成立背景、宗旨以及近年举办的各类论坛、研讨会情况做了简要介绍。他表示,中国自动化学会青年科学家论坛已成功举办17期,本期论坛能够在素有六朝古都的南京举办当感谢各主办、承办以及协办单位的倾力支持,希望此次论坛能够为青年学者提供一个高端学术交流平台,并预祝本次论坛圆满成功。
开幕式结束后,首先是夏元清教授带来了“多传感器网络系统数据滤波融合与故障可诊断性研究”主题报告。他从专业研究背景及其广泛应用入手,重点介绍了多传感器网络滤波与数据融合方法,包括间间隙性观测、数据驱动的非线性滤波系统稳定性与收敛性,噪声不相关的多传感器不可靠网络系统的分布式加权卡尔曼滤波融合,非线性多传感器网络系统的集中式尺度无迹卡尔曼滤波融合,具有未知输入扰动的非线性仿射多传感器网络系统的故障可诊断性研究等。

陈谋教授以“人工智能时代无人机决策与控制思考”为主题作报告。报告主要从人工智能对提升无人机自主能力所发挥的重要作用,多源信息自主融合技术、单体无人机智能决策与飞行控制技术、多无人机智能协同决策与协同飞行控制技术等方面所涉及的挑战问题进行了展望,并给出了一些未来研究方向和已取得的研究成果。

温广辉教授就“网络群体智能协同一致性理论及应用”做了精彩报告。他从鸟类群集、鱼群蜂拥等自然界中美妙的群体现象出发,引出群体智能及其所蕴含的分布式协同思想。并进一步介绍在新一代人工智能研究背景下,网络群体智能理论与技术的研究内涵和外延,着重介绍其研究内涵的深刻性和外延的广泛性,以及超越分布式协同框架的研究特点等。最后,报告展望了在新一代人工智能研究背景下,网络群体智能理论与技术的一些研究课题。

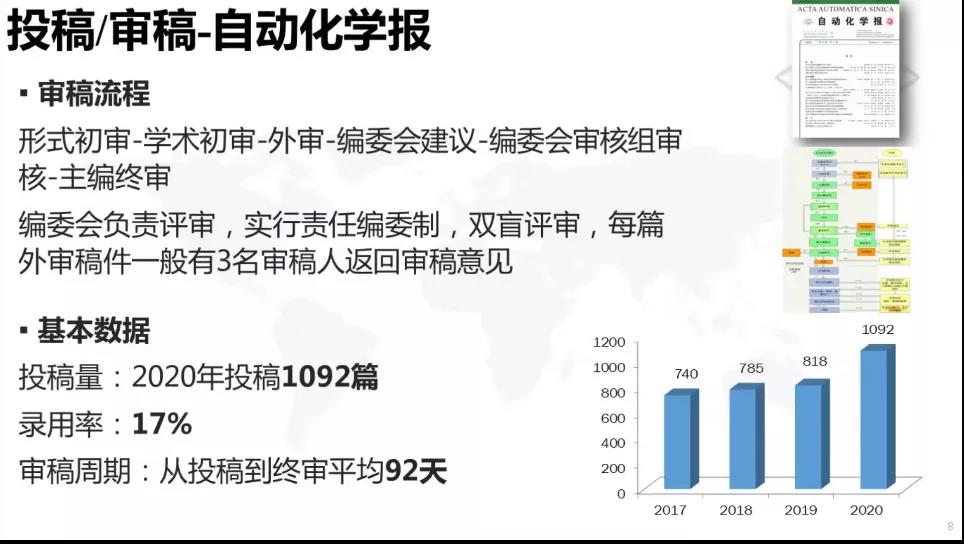
欧彦博士作线上报告,主要介绍了《自动化学报》与《自动化学报》(英文版)(IEEE/CAA Journal of Automatica Sinica)期刊。她从事期刊工作10年,具有丰富的期刊管理和出版经验。欧彦主任主要介绍了《自动化学报》和《自动化学报》(英文版)两刊发展现状、投稿审稿流程、作者及读者服务等,并用具体数据详解了近年投稿量、录用率、高被引情况以及发表文章的研究方向分布等。
孙健教授线上分享了“网络化系统安全控制”主题报告。他介绍,随着网络技术、嵌入式计算技术的飞速发展,控制系统逐步向网络化、协同化发展。孙教授主要分享了网络化系统安全控制的最新研究进展,首先是从攻击者的角度,研究最优切换攻击的设计方法;其次针对存在拒绝服务攻击的网络化系统,研究系统镇定控制器的设计方法;最后,他从图论的角度,分析多智能体系统存在外部攻击情况下的可观性问题。
周彬教授线上汇报的主题是“Finite-time stabilization by time-varying high-gain feedback”。此次汇报,他首先介绍了有限时间稳定性问题的理论吸引力与目前研究现状,从三种设计方法入手,在一个统一的框架下进行分析,介绍了采用基于统一LTV不等式的分析方法和时变高增益反馈方法解决了某些系统的定时镇定问题,并通过数值模拟结果表明了所提方法的有效性。
胡晓明教授带来了“Invariances and Nash equilibria In multi-agent systems”的线上精彩分享。胡教授研究方向主要为非线性反馈控制、非线性观测器设计、传感与主动感知、多自体系统的建模,分析及控制等,是目前活跃在国际控制理论领域的著名学者。他首先简要介绍了瑞典皇家理工学院及其与中国国内知名高校的合作交流情况。他从对记忆的自由回忆建模开始,然后使用图灵的形态发生素扩散模型来探索它与自组织涌现的联系,并通过具体案例来阐述研究中的创新性想法。

贺威教授线上就“柔性关节机器人智能控制方法与实验验证”展开汇报。报告主要讨论了柔性关节机器人智能控制系统的研究进展。他从解决柔性关节机械臂的精准跟踪控制问题切入,介绍一种能为柔性关节机器人智能控制系统提供精准跟踪控制保障的控制算法,并介绍了机器人智能分拣系统以及人与机器人之间的物体交接系统等研究。最后,贺教授对该方向进行了研究展望。

本次论坛在大会组委会与南京信息工程大学师生志愿者的协作努力下取得了圆满成功。论坛的成功举办为智能大数据分析融合及其应用领域的专家、学者和技术人员提供一个学术交流平台,展示最新的理论与技术成果。我们期待青年科学家论坛将吸引更多专家学者的踊跃参与,进一步扩大论坛影响力,形成良好的社会影响力,合力推动专业领域的科研进步与发展。